














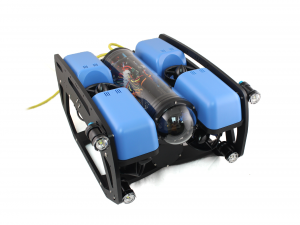


BlueROV2
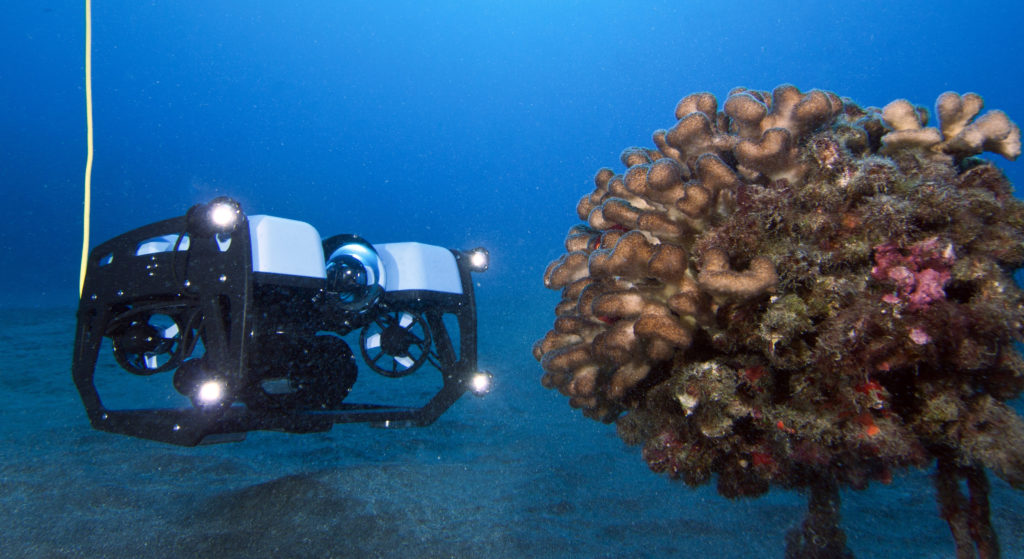
Các BlueROV2 là hầu hết giá cả phải chăng cao hiệu suất của thế giới ROV . Với cấu hình vectơ 6 lực đẩy, phần mềm và điện tử mã nguồn mở cùng nhiều khả năng mở rộng, đây là ROV hoàn hảo để kiểm tra, nghiên cứu và khám phá
LIÊN HỆ
Mô tả Sản phẩm
Các BlueROV2 là giá cả phải chăng nhất hiệu suất cao nhất thế giới dưới nước ROV. Với cấu hình bộ đẩy sáu và tám, một số phụ kiện có sẵn và phần mềm nguồn mở, nó có mức hiệu suất, tính linh hoạt và khả năng mở rộng chưa từng có. Với hàng nghìn đơn vị được cung cấp trong lĩnh vực này, BlueROV2 là một trong những máy bay không người lái dưới nước phổ biến nhất trên thị trường!
Các BlueROV2 đi kèm một phần lắp ráp và đòi hỏi 6-8 giờ sử dụng lắp ráp để hoàn thành. Trong quá trình lắp ráp, bạn học cách tất cả các thành phần của hệ thống hoạt động và ăn khớp với nhau và nó giúp bạn có kiến thức cần thiết để nâng cấp và cải tiến trong tương lai!
Camera HD trực tiếp và ánh sáng
Ở phía trước của ROV là một máy ảnh ánh sáng yếu góc rộng (1080p, 30 khung hình / giây) độ nét cao được tối ưu hóa để sử dụng trên ROV. Nó được gắn vào một cơ chế nghiêng để phi công có thể điều khiển độ nghiêng của máy ảnh để nhìn lên hoặc nhìn xuống, ngay cả khi ROV ngang bằng.
ROV có thể được cấu hình với hai hoặc bốn đèn Lumen có thể điều chỉnh độ sáng , cung cấp lên đến 6.000 lumen để chiếu sáng độ sâu của đại dương


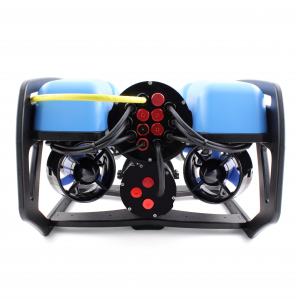
Cấu hình Vectored Thruster và Cấu hình nặng
ROV sử dụng Bộ đẩy T200 đã được cấp bằng sáng chế trong một cấu hình vectơ, cung cấp tỷ lệ lực đẩy trên trọng lượng cao và khả năng di chuyển chính xác theo bất kỳ hướng nào. ROV đi kèm với sáu bộ đẩy nhưng có thể mở rộng lên tám bộ đẩy với Bộ trang bị thêm cấu hình nặng , cung cấp khả năng kiểm soát sáu mức độ tự do và độ ổn định phản hồi.
Mức độ khuếch đại có thể điều chỉnh cho phép phi công kiểm soát chính xác ở tốc độ cực thấp cũng như công suất cao để vượt qua các dòng chảy và mang tải nặng.
Đánh giá độ sâu
Các BlueROV2 được đánh giá đến độ sâu 100 mét (330 ft). Đánh giá đó bị giới hạn bởi một số yếu tố, bao gồm độ sâu nghiền của ống bao kín nước acrylic 4 ”, với một số yếu tố an toàn
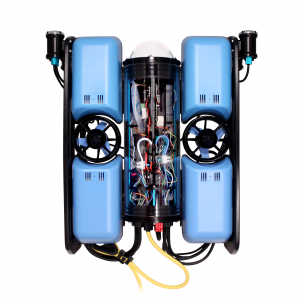
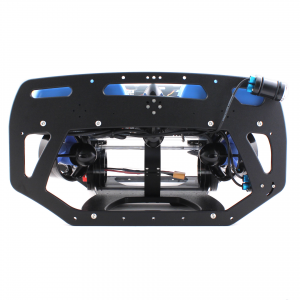
Thiết kế khung mô-đun và khả năng mở rộng
Được thiết kế giống như ROV lớp làm việc hoặc lớp nghiên cứu, BlueROV2 có khung mở mang các thiết bị điện tử và vỏ pin, bộ đẩy, bọt nổi và trọng lượng dằn. Thiết kế đơn giản này chắc chắn và có thể mở rộng, giúp bạn dễ dàng gắn các phụ kiện như bộ kẹp ROV hoặc sonar quét . Chúng tôi có sẵn một thanh trượt trọng tải có thể mở rộng khung hình hơn nữa và cho phép bạn đính kèm các trọng tải lớn hơn nhiều. Chúng tôi đã thấy mọi người sử dụng nó cho các dụng cụ khoa học, phụ kiện máy phun rửa áp lực, vỏ pin bổ sung, v.v.
Các BlueROV2 được thiết kế để mở rộng và sửa đổi và nhiều người sử dụng của chúng tôi đã thực hiện những thay đổi ấn tượng hơn cho phù hợp với các ứng dụng cụ thể của họ. Thay thế khung tiêu chuẩn bằng khung tùy chỉnh, bạn có thể tạo ra bất kỳ robot dưới nước nào mà bạn có thể tưởng tượng!

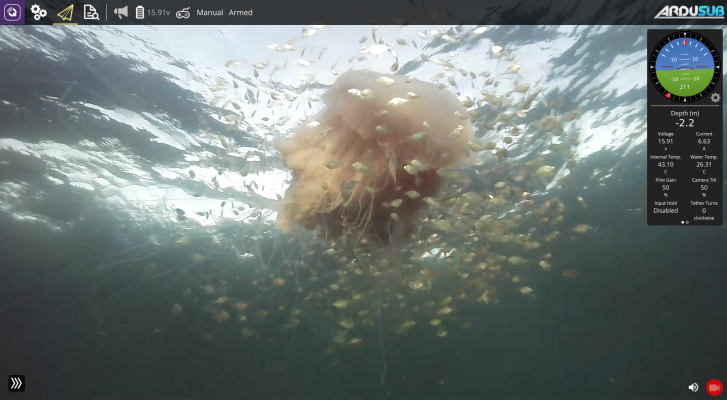
Phần mềm điều khiển mã nguồn mở và phần mềm giao diện người dùng
Các BlueROV2 được điều khiển bởi một bộ điều khiển chuyến bay bay không người lái chạy mã nguồn mở ArduSub firmware dưới biển kiểm soát xe. Là một phần của dự án ArduPilot , nó mang đến cho ROV một số lượng lớn các tính năng, khả năng và một cộng đồng người dùng rộng lớn.
Trên bề mặt, phi công điều khiển ROV thông qua máy tính xách tay và bộ điều khiển gamepad. Ứng dụng QGroundControl mã nguồn mở hoạt động như giao diện người dùng, cung cấp luồng video trực tiếp, phản hồi và thông tin cảm biến cũng như khả năng thay đổi cài đặt và cấu hình.
Bắt đầu với BlueROV2
Các BlueROV2 được thiết kế cho cả entry-level và người sử dụng ROV tiên tiến. Nó đi kèm với mọi thứ bạn cần để xuống nước ngoại trừ một số thành phần:
- Máy tính xách tay – Chúng tôi đề xuất kiểu máy từ trung bình đến cao cấp với hệ điều hành Windows 10, Mac hoặc Linux. Ngoài ra còn có một số máy tính bảng tương thích bao gồm máy tính bảng Windows Surface. iOS và Android không được hỗ trợ chính thức tại thời điểm này.
- Bộ điều khiển Gamepad – Chúng tôi khuyên bạn nên sử dụng bộ điều khiển Xbox One hoặc bộ điều khiển Logitech F310 hoặc F710.
- Pin – Chúng tôi khuyên dùng pin lithium-ion 14.8v, 18Ah của chúng tôi để có tuổi thọ pin tốt nhất, nhưng chúng tôi không thể giao hàng đến tất cả các địa điểm! Có một số loại pin tương thích khác cũng có thể được sử dụng. Chúng tôi khuyên bạn nên mua một vài chiếc để mở rộng hoạt động.
- Bộ sạc pin – Chúng tôi cũng có bộ sạc được khuyến nghị , nhưng bất kỳ bộ sạc pin lithium-ion nào có thể xử lý pin của bạn sẽ hoạt động!
Các tùy chọn, Tiện ích bổ sung và Phụ kiện có sẵn
Trước hết, có một số tùy chọn có thể định cấu hình mà bạn sẽ phải chọn:
- Các Fathom Tether chiều dài có thể được lựa chọn từ 25 mét tất cả các con đường lên đến 300 mét. Độ dài bạn đi phụ thuộc vào độ sâu và mức độ bạn muốn đi. Đối với độ dài trên 100 mét, chúng tôi khuyên bạn nên sử dụng Fathom Spool để giúp quản lý dễ dàng hơn.
- Các đèn có sẵn trong cấu hình 2-ánh sáng và 4 ánh sáng yếu. Nếu bạn dự định làm nhiều việc trong điều kiện ánh sáng kém hoặc vào ban đêm, bạn có thể muốn cấu hình 4 đèn.
Khi bạn đã nắm chắc những kiến thức cơ bản, có vô số cách để mở rộng BlueROV2 của bạn ! Chúng tôi có một số phụ kiện cốt lõi:
- Các Newton Gripper cho phép bạn thao tác và lấy vật dưới nước
- Các Fathom ống chỉ làm cho nó dễ dàng hơn để vận chuyển và sử dụng cáp tether
- Bộ trang bị thêm cho cấu hình nặng bổ sung thêm hai động cơ đẩy và thêm sức nổi để tăng cường độ ổn định và khả năng chuyên chở trọng tải
- Các Ping360 quét Sonar làm cho nó dễ dàng hơn để di chuyển trong điều kiện nước tầm nhìn thấp và định vị dưới nước đối tượng
- Các nước Liên Kết Underwater GPS Kit cung cấp một hệ thống cho việc định vị dựa trên bản đồ và điều hướng
Specifications
| Parameter | Value | |
|---|---|---|
| Physical | ||
| Length | 457 mm | 18 in |
| Width | 338 mm | 13.3 in |
| Height | 254 mm | 10 in |
| Weight in Air (with Ballast) | 10-11 kg | 22-24 lb |
| Weight in Air (without Ballast) | 9-10 kg | 20-22 lb |
| Net Buoyancy (with Ballast) | 0.2 kg | 0.5 lb |
| Net Buoyancy (without Ballast) | 1.4 kg | 3 lb |
| Payload Capacity (configuration dependent) | 1.0 kg (4x Lumens) to 1.2 kg (no Lumens) | 2.2 to 2.6 lbs |
| Cable Penetrator Holes | 14 x 10 mm | 14 x 0.4 in |
| Construction | HDPE frame, aluminum flanges/end cap, and acrylic tubes | |
| Main Tube (Electronics Enclosure) | Blue Robotics 4 inch series w/ aluminum end caps | |
| Battery Tube | Blue Robotics 3 inch series w/ aluminum end caps | |
| Buoyancy Foam | R-3318 Urethane Foam rated to 244 meters | |
| Ballast Weight | 6 x 200 g coated lead weights | |
| Battery Connector | XT90 | |
| Performance | ||
| Maximum Rated Depth | 100 m | 330 ft |
| Maximum Tested Depth (so far) | 130 m | 425 ft |
| Temperature Range | 0-30°C | 32-86°F |
| Maximum Forward Speed | 1.5 m/s | 3 knots |
| Thrusters | Blue Robotics T200 | |
| ESC | Blue Robotics Basic 30A ESC | |
| Thruster Configuration | 6 thrusters | |
| (4 Vectored) | ||
| (2 Vertical) | ||
| Forward Bollard Thrust (45°) | 9 kgf | 19.8 lbf |
| Vertical Bollard Thrust | 7 kgf | 15.4 lbf |
| Lateral Bollard Thrust (45°) | 9 kgf | 19.8 lbf |
| Battery | ||
| Battery Life (Normal Use) | ~2 hours w/ 18AH Lithium-ion Battery | |
| Battery Life (Light Use) | ~4 hours w/ 18AH Lithium-ion Battery | |
| The batteries can be changed in about 30 seconds. | ||
| Lights | ||
| Brightness | 1500 lumens each with dimming control | |
| Light Beam Angle | 135 degrees, with adjustable tilt | |
| Tether | ||
| Diameter | 7.6 mm | 0.30 in |
| Length | 25-300 m | 80-980 ft |
| Working Strength | 45 kgf | 100 lbf |
| Breaking Strength | 160 kgf | 350 lbf |
| Strength Member | Kevlar with waterblock | |
| Buoyancy in Freshwater | Neutral | |
| Buoyancy in Saltwater | Slightly Positive | |
| Conductors | 4 twisted pairs, 26 AWG | |
| Sensors | ||
| Gyroscope | 3-DOF Gyroscope (on the PixHawk) | |
| Accelerometer | 3-DOF Accelerometer (on the PixHawk) | |
| Compass | 3-DOF Magnetometer (on the PixHawk) | |
| Internal pressure | Internal barometer (on the PixHawk) | |
| Pressure/Depth and Temperature Sensor (external) | Blue Robotics Bar30 | |
| Current and Voltage Sensing | Blue Robotics Power Sense Module | |
| Leak Sensor | Blue Robotics SOS Leak Sensor | |
| Camera Tilt | ||
| Tilt Range | +/- 90 degree camera tilt (180 total range) | |
| Tilt Servo | Hitec HS-5055MG | |
| Camera | ||
| Field of View (Underwater) | 110 degrees (horizontal) | |
| Light Sensitivity | 0.01 lux | |
| Resolution | 1080p | |
| Control System | ||
| Tether Interface Board | Fathom-X Tether Interface Board | |
| Control Board | Pixhawk 1 | |
| Control Software | ArduSub | |
System Requirements
| Parameter | Value |
|---|---|
| Operating System | |
| Windows | Windows 10 64bit |
| macOS | 10.20 or later |
| Ubuntu | Latest LTS (20.04) or later |
| Minimum Recommended Hardware | |
| Processor | i5 processor or better |
| RAM | 8GB |
| Storage | Solid-state drive (SSD) |
Related products

Robot Universal